

 QQ
QQ 微信
微信

喷涂机器人坐标系,基本和工业机器人一样。
大地坐标 World其他坐标参考的全局基准,是系统中的自定义位置和方向。
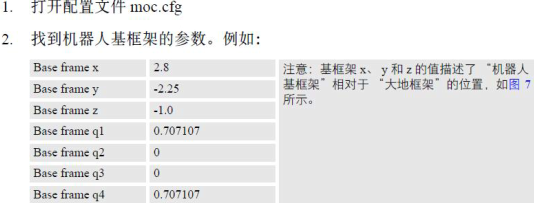
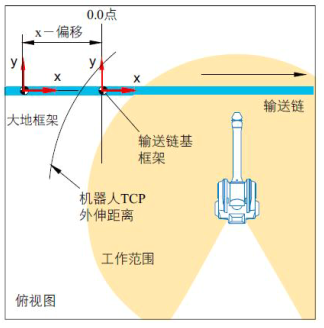
输入“机器人基框架”等参数前,须确定“大地框架”坐标系的确切位置和方向。
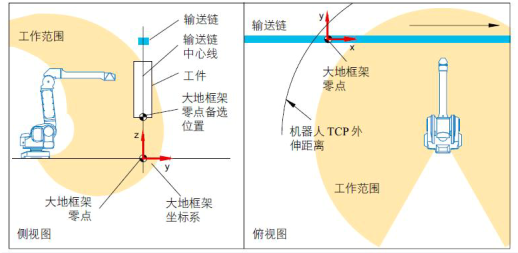
确定了相对于“大地坐标”的机器人位置和方向。
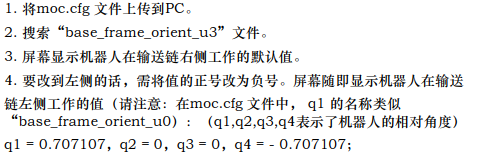
在*简单配置里设为左侧或右侧机器人位置。
(输送链移动方向多数情况下垂直于默认的机器人基坐标)
一般来说,默认出厂的是设置是机器人在输送链的右侧。
如果在左侧,则进行如下配置:
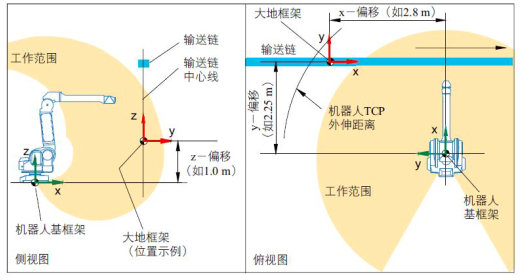
是相对于“大地坐标”的输送链坐标系位置。
当多台机器人在同一条输送链上一起喷涂同一工件时,建议用机器人大地坐标(框架)来
确定机器人相对输送链的位置。
“用户坐标”与“工件坐标”决定了工件的位置。
“用户坐标”随输送链移动,与“输送链基坐标”相关联。
“工件坐标”与“用户坐标”相关联,决定了工件相对于“用户坐标”的位置。

- 下一篇:ABB管线包的作用和特点
- 上一篇:如何检测ABB机器人管线包故障
